1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
| from cv2 import cv2
import numpy as np
import math
class PolygonContainer:
"""存储检测到的特定类型的多边形的容器。
Attributes:
name (str): 该容器存储的多边形的类型名称。
vertex_count (int): 该多边形类型的顶点数需满足的条件,若为0则代表任意值。
check (func(contour, approx) -> bool): 该多边形类型的特判函数。
contours (list): 检测到的该类型的多边形的轮廓的列表。
centroids (list): 检测到的该类型的多边形的轮廓中心的列表。
"""
def __init__(self, name, vertex_count, check):
"""PolygonContainer类的初始化函数,各参数含义与类注释中一致。
"""
self.name = name
self.vertex_count = vertex_count
self.check = check
self.contours = []
self.centroids = []
def showPolygonContours(title, img, contours, centroids):
"""在img上绘制多边形并显示。
Args:
title (str): 显示窗口的标题。
img (np.ndarray): 待绘制多边形的图像。
contours (list): 多边形的轮廓列表。
centroids (list): 多边形的轮廓中心列表。
"""
img_temp = np.copy(img)
cv2.drawContours(img_temp, contours, -1, (0, 0, 0), 3)
for mc in centroids:
cv2.circle(img_temp, tuple(mc), 2, (0, 0, 0), 5)
cv2.namedWindow(title, cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow(title, img_temp)
def denoise(gray, method):
"""灰度图的去噪。
Args:
gray (np.ndarray): 待去噪的灰度图。
method (str): 去噪所使用的方法名。
Returns:
blurred: 去噪后得到的图像。
"""
if method == "MedianBlur":
blurred = cv2.medianBlur(gray, 5)
cv2.namedWindow("MedianBlur", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("MedianBlur", blurred)
return blurred
elif method == "GuassBlur":
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv2.namedWindow("GuassBlur", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("GuassBlur", blurred)
return blurred
else:
print("No such denoise method!")
return np.copy(gray)
def binarize(gray, method):
"""灰度图的二值化。
Args:
gray (np.ndarray): 待二值化的灰度图。
method (str): 二值化所使用的方法名。
Returns:
thresh: 二值化后得到的图像。
"""
if method == "AdaptiveThreshold":
thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 3, 1)
cv2.namedWindow("AdaptiveThreshold", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("AdaptiveThreshold", thresh)
return thresh
elif method == "Canny":
thresh = cv2.Canny(gray, 50, 100)
cv2.namedWindow("Canny", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("Canny", thresh)
return thresh
else:
print("No such binarize method!")
return np.copy(gray)
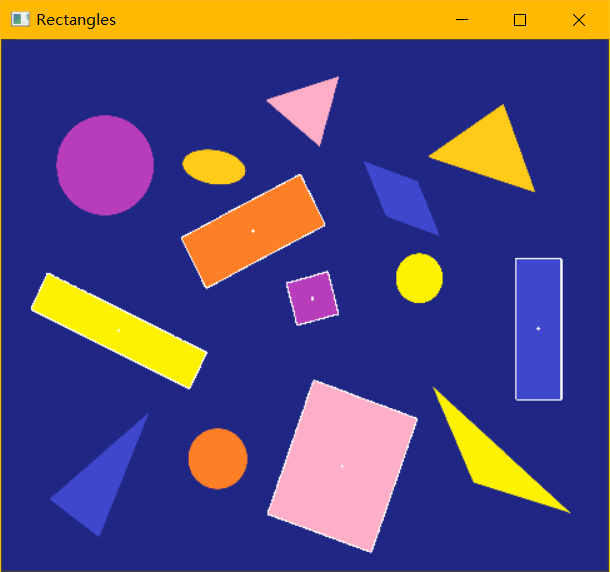
def rectangleCheck(contour, approx):
"""矩形特判函数。
Args:
contour (np.ndarray): 待判定的轮廓。
approx (np.ndarray): 待判定的轮廓的多边形逼近。
Returns:
bool: 表示contour与approx是否表示一个矩形。
"""
contour_area = cv2.contourArea(contour)
rect = cv2.minAreaRect(contour)
box = cv2.boxPoints(rect)
box = np.int0(box)
box_area = cv2.contourArea(box)
if math.fabs(contour_area-box_area)/contour_area > 0.05:
return False
for vid in range(0, len(approx)):
vec_a = approx[vid-1][0] - approx[vid][0]
vec_b = approx[(vid+1) % len(approx)][0] - approx[vid][0]
norm_a = np.linalg.norm(vec_a)
norm_b = np.linalg.norm(vec_b)
cos = np.inner(vec_a, vec_b) / (norm_a*norm_b)
if cos > math.cos((90-10)*math.pi/180) or cos < math.cos((90+10)*math.pi/180):
return False
return True
def filterRepeatedContours(contours, centroids):
"""去除contours与cnetroids中重复的轮廓与相应的中心。
Args:
contours (list): 待去重的轮廓的列表。
centroids (list): 待去重的轮廓中心的列表。
Returns:
contours: 去除重复轮廓后的轮廓列表。
centroids: 去除重复轮廓对应的中心后的轮廓中心列表。
"""
is_valid = np.ones(len(contours), dtype=bool)
area = [cv2.contourArea(c) for c in contours]
for cid0 in range(len(contours)):
if is_valid[cid0]:
area0 = area[cid0]
for cid1 in range(cid0+1, len(contours)):
vec = centroids[cid0] - centroids[cid1]
distance = np.linalg.norm(vec)
area1 = area[cid1]
area_diff = math.fabs(area0-area1)
match = cv2.matchShapes(contours[cid0], contours[cid1], 1, 0.0)
if distance < 30 and area_diff < 1000 and match < 0.03:
is_valid[cid1] = False
contours = [contours[cid] for cid in range(len(contours)) if is_valid[cid]]
centroids = [centroids[cid] for cid in range(len(centroids)) if is_valid[cid]]
return contours, centroids
def filterContourVertices(contour):
"""去除轮廓contour中重复的顶点。
Args:
contour (np.ndarray): 待去除重复顶点的轮廓。
Returns:
contour: 去除重复顶点后的轮廓。
"""
is_valid = np.ones(contour.shape[0], dtype=bool)
for vid0 in range(0, len(contour)):
if is_valid[vid0]:
for vid1 in range(vid0+1, len(contour)):
vec = contour[vid0] - contour[vid1]
distance = np.linalg.norm(vec)
if distance < 5:
is_valid[vid1] = False
contour = contour[is_valid, :]
is_valid = np.ones(contour.shape[0], dtype=bool)
for vid in range(0, len(contour)):
vec_a = contour[vid-1] - contour[vid]
vec_b = contour[(vid+1) % len(contour)] - contour[vid]
norm_a = np.linalg.norm(vec_a)
norm_b = np.linalg.norm(vec_b)
cos = np.inner(vec_a, vec_b) / (norm_a*norm_b)
if cos < math.cos(math.pi*160/180):
is_valid[vid] = False
contour = contour[is_valid, :]
return contour
def polygonDetect(img, denoised, approxs, *polygonContainers):
"""多边形的检测函数。
Args:
img (np.ndarray): 原图。
denoised (np.ndarray): 去噪后的图像。
approxs (PolygonContainer): 存储所有多边形的容器。
polygonContainers (list): 存储待检测的类型的多边形的容器列表。
"""
thresh = binarize(denoised, "Canny")
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img_contours = np.copy(img)
cv2.drawContours(img_contours, contours, -1, (0, 0, 0), 2)
cv2.namedWindow("Contours", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("Contours", img_contours)
centroids = []
for c in contours:
mu = cv2.moments(c, False)
if np.isclose(mu['m00'], 0):
mc = contours[0][0]
else:
mc = [mu['m10'] / mu['m00'], mu['m01'] / mu['m00']]
mc = np.int0(mc)
centroids.append(mc)
contours, centroids = filterRepeatedContours(contours, centroids)
for cid in range(0, len(contours)):
c = contours[cid]
mc = centroids[cid]
if cv2.contourArea(c) < 100:
continue
epsilon = 0.02 * cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, epsilon, True)
approx = filterContourVertices(approx)
approxs.contours.append(approx)
approxs.centroids.append(mc)
vertex_count = len(approx)
for container in polygonContainers:
if vertex_count == container.vertex_count and container.check(c, approx):
container.contours.append(c)
container.centroids.append(mc)
showPolygonContours(approxs.name, img, approxs.contours, approxs.centroids)
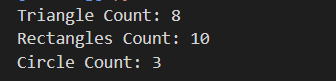
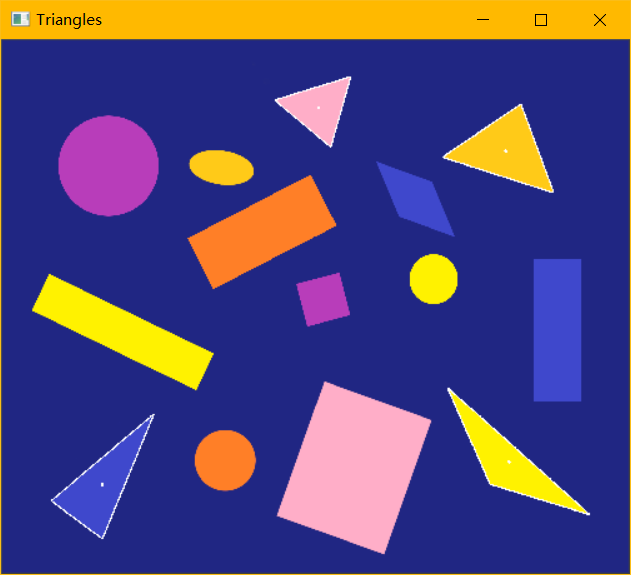
for container in polygonContainers:
showPolygonContours(container.name, img, container.contours, container.centroids)
print("{0} Count: {1}".format(container.name, len(container.centroids)))
def circleDetect(img, denoised):
"""圆的检测函数。
Args:
img (np.ndarray): 原图。
denoised (np.ndarray): 去噪后的图像。
"""
circles = cv2.HoughCircles(denoised, cv2.HOUGH_GRADIENT, 1, 30, param1=50, param2=60, minRadius=0, maxRadius=0)
circles = np.uint16(np.around(circles))
img_circles = np.copy(img)
for i in circles[0, :]:
cv2.circle(img_circles, (i[0], i[1]), i[2], (0, 0, 0), 3)
cv2.circle(img_circles, (i[0], i[1]), 2, (0, 0, 0), 5)
cv2.namedWindow("Circle", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("Circle", img_circles)
print("Circle Count: {0}".format(circles.shape[1]))
def shapeDetect(img_path):
"""形状检测函数。
Args:
img_path (str): 图像的路径。
"""
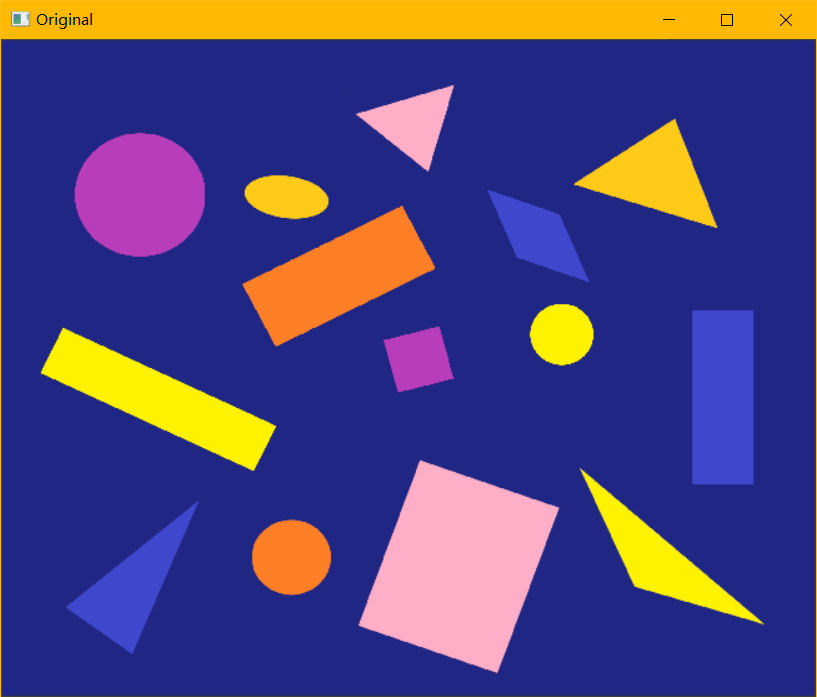
img = cv2.imread(img_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.namedWindow("Original", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("Original", img)
cv2.namedWindow("Gray", cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO)
cv2.imshow("Gray", gray)
denoised = denoise(gray, "MedianBlur")
approxs = PolygonContainer("ApproxPolygons", 0, lambda contour, approx : True)
triangles = PolygonContainer("Triangle", 3, lambda contour, approx : True)
rectangles = PolygonContainer("Rectangle", 4, rectangleCheck)
polygonDetect(img, denoised, approxs, triangles, rectangles)
circleDetect(img, denoised)
def main():
"""主函数。
"""
img_path = './images/1.png'
shapeDetect(img_path)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
|